ไดเร็กทอรี
1. แนวคิดหลักและตัวชี้วัด
2. เทคนิคการวัด
3. การประมวลผลข้อมูลและข้อผิดพลาด
4. ผลกระทบต่อกระบวนการ
ในกระบวนการผลิตเซมิคอนดักเตอร์ ความสม่ำเสมอของความหนาและความเรียบของพื้นผิวเวเฟอร์เป็นปัจจัยสำคัญที่ส่งผลต่อผลผลิตของกระบวนการ พารามิเตอร์หลัก เช่น ความแปรผันของความหนารวม (TTV) การโก่งงอ (การบิดเบี้ยวเป็นรูปโค้ง) การบิดเบี้ยวโดยรวม (การบิดเบี้ยวระดับไมโคร หรือลักษณะพื้นผิวระดับนาโน) ส่งผลโดยตรงต่อความแม่นยำและความเสถียรของกระบวนการหลัก เช่น การโฟกัสด้วยโฟโตลิโทกราฟี การขัดเงาเชิงกลเคมี (CMP) และการตกตะกอนฟิล์มบาง
แนวคิดหลักและตัวชี้วัด
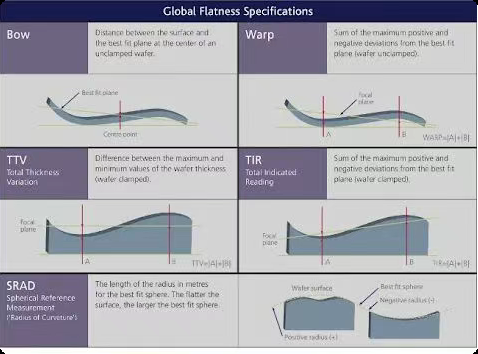
TTV (ค่าความแปรผันความหนารวม)
วาร์ป
ค่าการบิดเบี้ยว (Warp) คือค่าความแตกต่างสูงสุดระหว่างจุดสูงสุดและจุดต่ำสุดของพื้นผิวทั้งหมดเมื่อเทียบกับระนาบอ้างอิง ซึ่งเป็นการประเมินความเรียบโดยรวมของแผ่นเวเฟอร์ในสภาวะอิสระ
เทคนิคการวัด
1. วิธีการวัด TTV
- การวัดโปรไฟล์พื้นผิวคู่
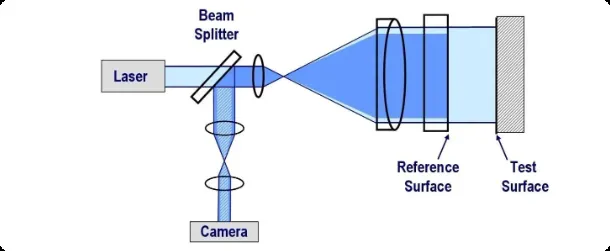
- การแทรกสอดแบบฟิโซ:ใช้หลักการของแถบการแทรกสอดระหว่างระนาบอ้างอิงและพื้นผิวของเวเฟอร์ เหมาะสำหรับพื้นผิวเรียบ แต่มีข้อจำกัดสำหรับเวเฟอร์ที่มีความโค้งมาก
- การวัดด้วยอินเตอร์เฟอโรเมตรีแบบสแกนด้วยแสงขาว (SWLI):วัดความสูงสัมบูรณ์โดยใช้คลื่นแสงที่มีความสอดคล้องต่ำ เหมาะสำหรับพื้นผิวที่มีลักษณะเป็นขั้นบันได แต่ถูกจำกัดด้วยความเร็วในการสแกนเชิงกล
- วิธีการคอนโฟคอล:สามารถสร้างภาพที่มีความละเอียดระดับต่ำกว่าไมครอนได้ด้วยหลักการของรูเข็มหรือการกระจายแสง เหมาะสำหรับพื้นผิวที่หยาบหรือโปร่งแสง แต่จะทำงานช้าเนื่องจากการสแกนแบบจุดต่อจุด
- การวัดระยะด้วยเลเซอร์แบบสามเหลี่ยม:ตอบสนองรวดเร็ว แต่มีแนวโน้มที่จะสูญเสียความแม่นยำเนื่องจากความแปรผันของการสะท้อนแสงบนพื้นผิว
- การเชื่อมต่อแบบส่งผ่าน/สะท้อน
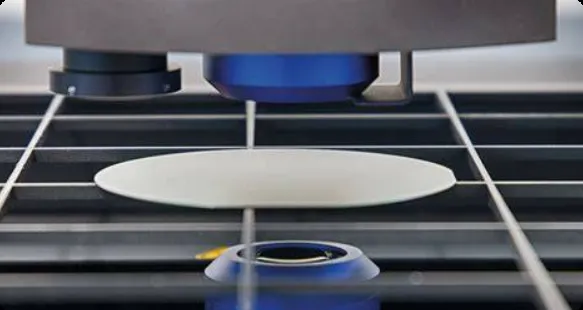
- เซ็นเซอร์วัดค่าความจุแบบสองหัว: การจัดวางเซ็นเซอร์แบบสมมาตรทั้งสองด้านจะวัดความหนาโดยใช้สูตร T = L – d₁ – d₂ (L = ระยะห่างจากเส้นฐาน) วัดได้รวดเร็วแต่ไวต่อคุณสมบัติของวัสดุ
- เอลลิปโซเมตรี/สเปกโทรสโคปิก รีเฟล็กโตเมตรี: วิเคราะห์ปฏิสัมพันธ์ระหว่างแสงกับสสารสำหรับฟิล์มบาง แต่ไม่เหมาะสำหรับ TTV แบบก้อน
2. การวัดความโค้งและความยาวของเส้นด้าย
- ชุดหัววัดความจุแบบหลายโพรบ: บันทึกข้อมูลความสูงแบบเต็มพื้นที่บนแท่นรองรับอากาศเพื่อการสร้างภาพ 3 มิติอย่างรวดเร็ว
- การฉายแสงแบบมีโครงสร้าง: การสร้างโปรไฟล์ 3 มิติความเร็วสูงโดยใช้การปรับรูปร่างด้วยแสง
- การแทรกสอดแบบ Low-NA: การสร้างแผนที่พื้นผิวความละเอียดสูง แต่ไวต่อการสั่นสะเทือน
3. การวัดไมโครวาร์ป
- การวิเคราะห์ความถี่เชิงพื้นที่:
- บันทึกภาพพื้นผิวที่มีความละเอียดสูง
- คำนวณความหนาแน่นสเปกตรัมกำลัง (PSD) โดยใช้ FFT แบบ 2 มิติ
- ใช้ตัวกรองแบบแถบความถี่ (เช่น 0.5–20 มม.) เพื่อแยกความยาวคลื่นที่สำคัญ
- คำนวณค่า RMS หรือ PV จากข้อมูลที่ผ่านการกรองแล้ว
- การจำลองหัวจับสุญญากาศ:จำลองผลกระทบจากการหนีบในโลกแห่งความเป็นจริงระหว่างกระบวนการพิมพ์หิน
การประมวลผลข้อมูลและแหล่งที่มาของข้อผิดพลาด
ขั้นตอนการประมวลผล
- ทีทีวี:จัดแนวพิกัดพื้นผิวด้านหน้า/ด้านหลัง คำนวณความแตกต่างของความหนา และลบข้อผิดพลาดที่เป็นระบบ (เช่น การเปลี่ยนแปลงตามอุณหภูมิ)
- คันธนู/การบิดเบี้ยว:ปรับระนาบ LSQ ให้เข้ากับข้อมูลความสูง; Bow = ค่าความคลาดเคลื่อน ณ จุดศูนย์กลาง, Warp = ค่าความคลาดเคลื่อนจากจุดสูงสุดถึงจุดต่ำสุด
- ไมโครเวฟ:กรองความถี่เชิงพื้นที่ คำนวณค่าสถิติ (RMS/PV)
แหล่งที่มาของข้อผิดพลาดที่สำคัญ
- ปัจจัยด้านสิ่งแวดล้อม:การสั่นสะเทือน (สำคัญมากสำหรับการวัดด้วยอินเตอร์เฟอโรเมตรี), ความปั่นป่วนของอากาศ, การเปลี่ยนแปลงตามอุณหภูมิ
- ข้อจำกัดของเซ็นเซอร์:สัญญาณรบกวนเฟส (อินเตอร์เฟอโรเมตรี), ข้อผิดพลาดในการสอบเทียบความยาวคลื่น (คอนโฟกัล), การตอบสนองที่ขึ้นอยู่กับวัสดุ (คาปาซิแตนซ์)
- การจัดการเวเฟอร์:ความคลาดเคลื่อนของการตัดขอบ, ความไม่แม่นยำของแท่นเคลื่อนที่ในการเย็บภาพ

ผลกระทบต่อความสำคัญของกระบวนการ
- การพิมพ์หิน:การบิดเบี้ยวเล็กน้อยเฉพาะจุดลดความชัดลึก ทำให้เกิดความแปรผันของขนาดและข้อผิดพลาดในการซ้อนทับกัน
- ซีเอ็มพี:ความไม่สมดุลของค่า TTV ในช่วงเริ่มต้นส่งผลให้แรงกดในการขัดไม่สม่ำเสมอ
- การวิเคราะห์ความเครียด:การเปลี่ยนแปลงรูปทรงโค้งงอเผยให้เห็นพฤติกรรมของความเค้นทางความร้อนและทางกล
- บรรจุภัณฑ์:ค่า TTV ที่มากเกินไปจะทำให้เกิดช่องว่างในบริเวณรอยต่อของวัสดุ
เวเฟอร์แซฟไฟร์ของ XKH
วันที่เผยแพร่: 28 กันยายน 2025